FlyMap
Jun 2018Interactive maps have become ubiquitous in our daily lives, helping us reach destinations and discovering our surroundings. Yet, designing map interactions is not straightforward and depends on the device being used. As mobile devices evolve and become independent from users, such as with robots and drones, how will we interact with the maps they provide? We propose FlyMap as a novel user experience for drone based interactive maps. We designed and developed three interaction techniques for FlyMap’s usage scenarios. In a comprehensive indoor study (N = 16), we show the strengths and weaknesses of two techniques on users’ cognition, task load, and satisfaction. FlyMap was then pilot tested with the third technique outdoors in real world conditions with four groups of participants (N = 13). We show that FlyMap’s interactivity is exciting to users and opens the space for more direct interactions with drones.
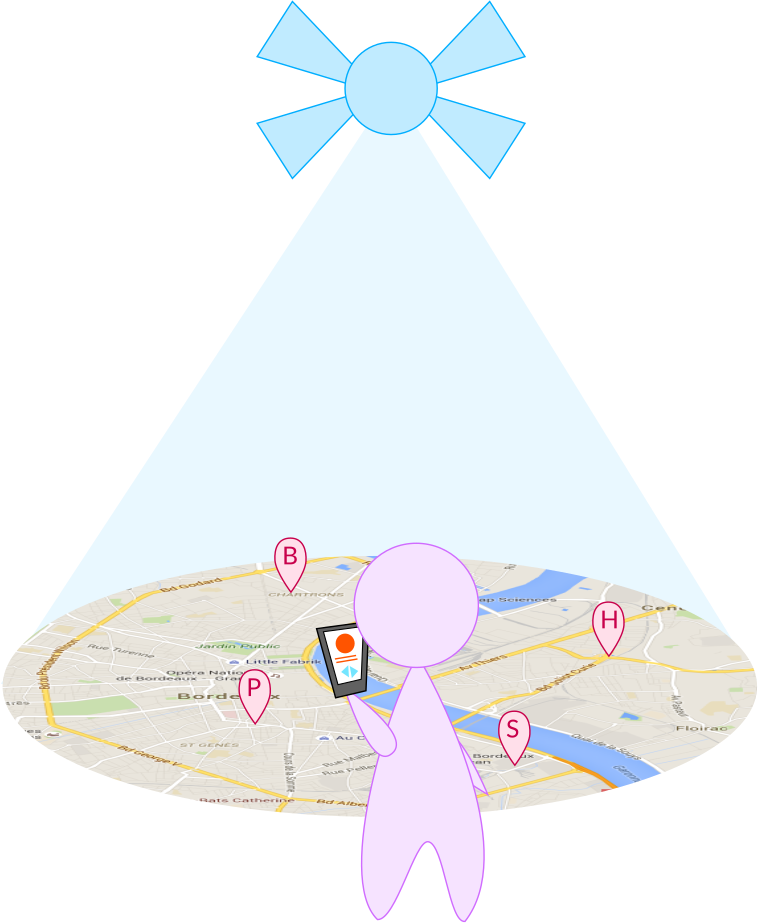
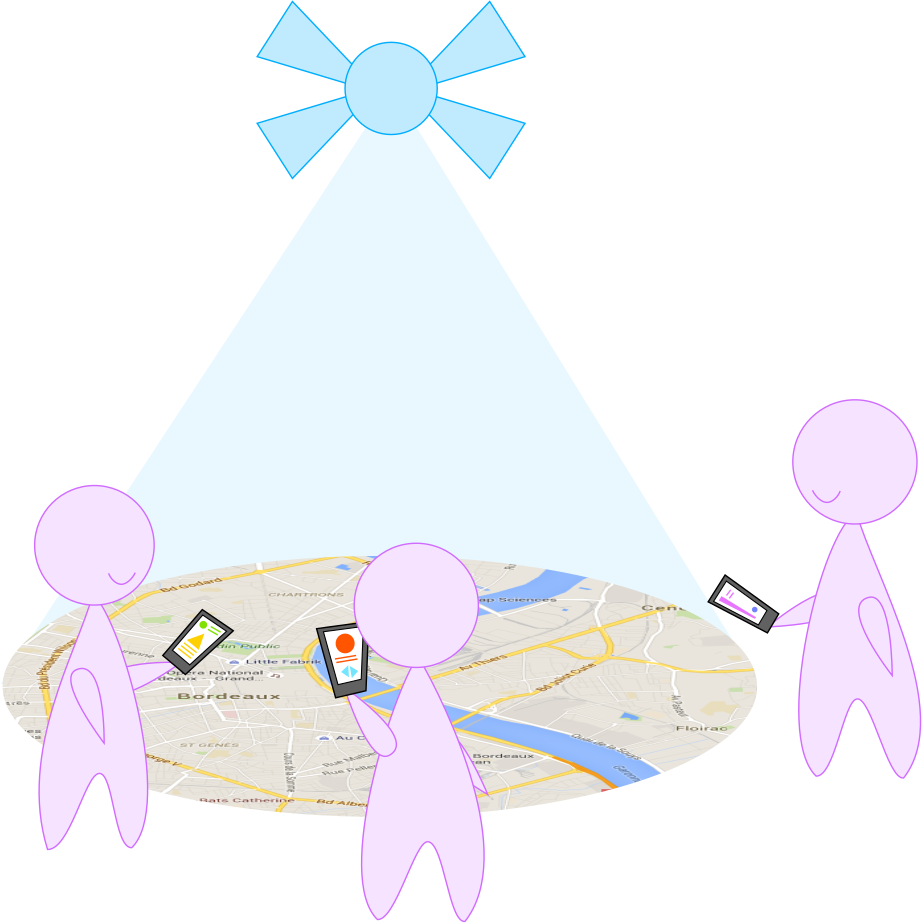
Concept
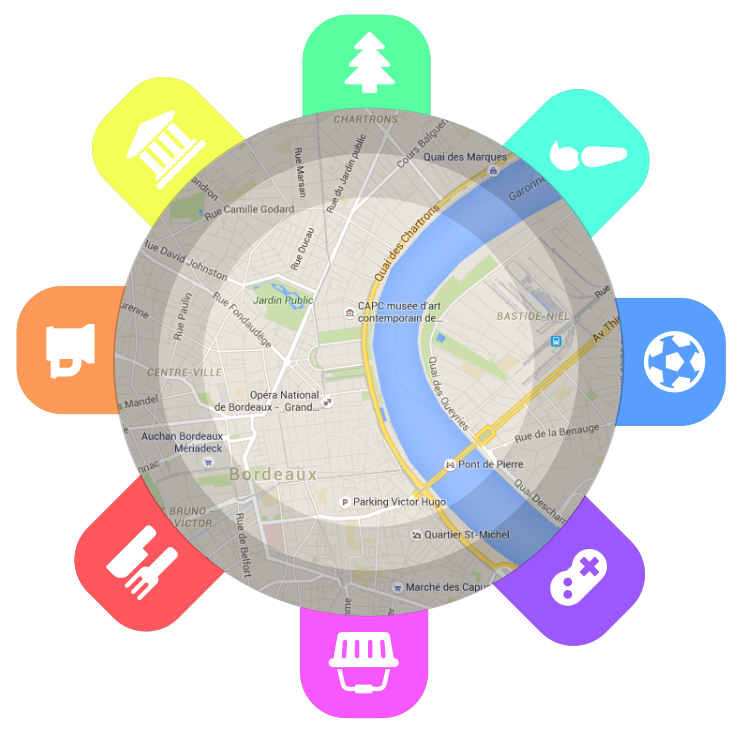
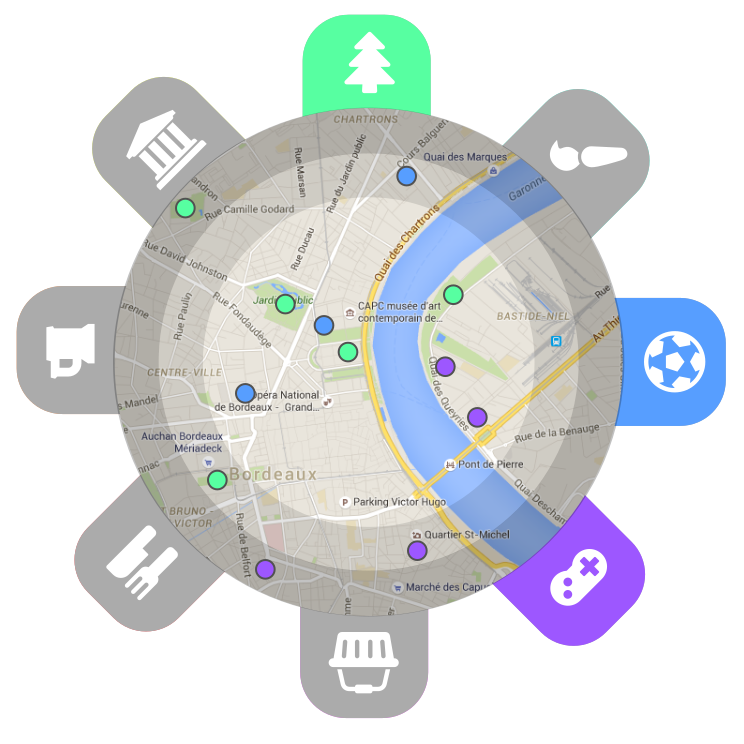
Interface design


First prototype
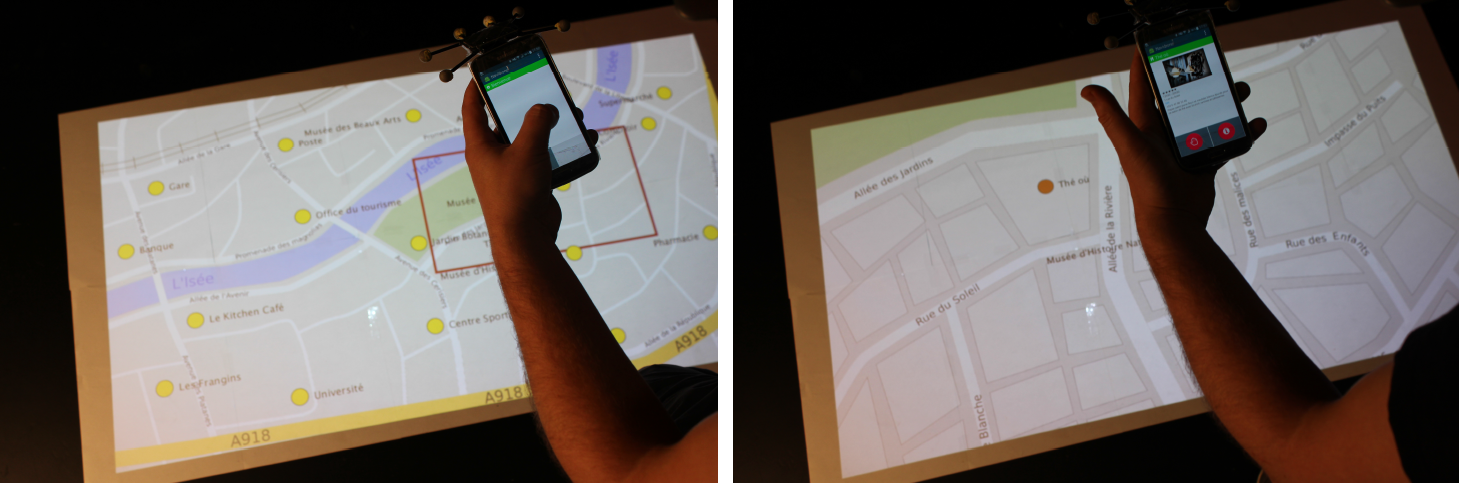
Final prototype
FlyMap used as a tour guide at Stanford University

Team
- Anke Brock
- Julia Chatain
- Michelle Park
- Tommy Fang
- Martin Hachet
- James A. Landay
- Jessica R. Cauchard
Publications
Brock, Anke M., Julia Chatain, Michelle Park, Tommy Fang, Martin Hachet, James A. Landay, and Jessica R. Cauchard. "Flymap: Interacting with maps projected from a drone." In Proceedings of the 7th ACM International Symposium on Pervasive Displays, pp. 1-9. (2018). (link) (pdf)